



研究方向
研究方向
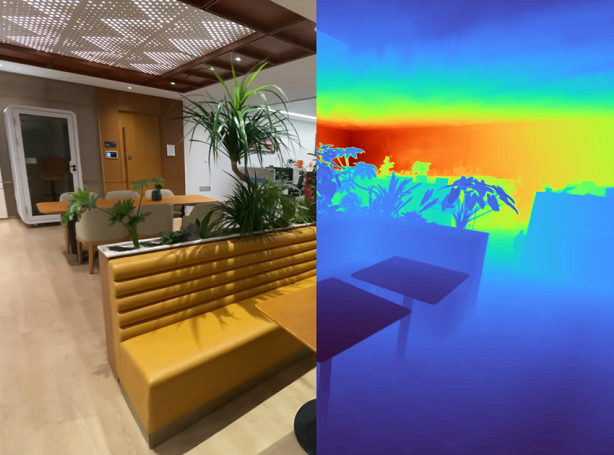
具身世界重建
面向具身智能场景,探索低成本、高质量的世界重建方法,为具身任务提供包括场景、物体在内的视觉真实、几何精准的资产。

具身数据合成
研究大模型赋能的3D仿真场景生成、具身智能体长序列任务生成、以及多模态传感器数据生成,面向公共服务、工厂等应用场景,为具身智能体技能学习提供合理的场景、丰富的任务及高逼真的传感器数据。

智能体自主学习平台
构建支持大规模异构机器人同服仿真与训练的基础设施,支持超真实的画面渲染、低时延/高帧率/多样化的运行时环境、丰富的机器人原子技能,缩短技能训练周期并提升泛化性、降低数据采集成本等。

具身感知与决策
多模态大模型赋能智能体,端到端自主探索、自主学习,面向室内服务、智能制造等应用场景,为客户提供更柔性、更智能的机器人技术

具身世界重建
面向具身智能场景,探索低成本、高质量的世界重建方法,为具身任务提供包括场景、物体在内的视觉真实、几何精准的资产。
具身数据合成
研究大模型赋能的3D仿真场景生成、具身智能体长序列任务生成、以及多模态传感器数据生成,面向公共服务、工厂等应用场景,为具身智能体技能学习提供合理的场景、丰富的任务及高逼真的传感器数据。

智能体自主学习平台
构建支持大规模异构机器人同服仿真与训练的基础设施,支持超真实的画面渲染、低时延/高帧率/多样化的运行时环境、丰富的机器人原子技能,缩短技能训练周期并提升泛化性、降低数据采集成本等。

具身感知与决策
多模态大模型赋能智能体,端到端自主探索、自主学习,面向室内服务、智能制造等应用场景,为客户提供更柔性、更智能的机器人技术
招贤纳士
加入我们
我们旨在打造具身智能领域的世界级团队,诚邀各路英才加入!
目前的招聘方向有具身世界重建、具身数据合成、智能体自主学习平台以及具身感知和决策,
岗位有实习生、校招生、博士生和天才少年,工作地点在上海和深圳。
我们将为您提供广阔的发展空间和丰富的技术挑战,欢迎共同开创具身智能的未来!
查看机会
目前的招聘方向有具身世界重建、具身数据合成、智能体自主学习平台以及具身感知和决策,
岗位有实习生、校招生、博士生和天才少年,工作地点在上海和深圳。
我们将为您提供广阔的发展空间和丰富的技术挑战,欢迎共同开创具身智能的未来!
